MIT ‘Cheetah’ Robot Rivals Running Animals in Efficiency
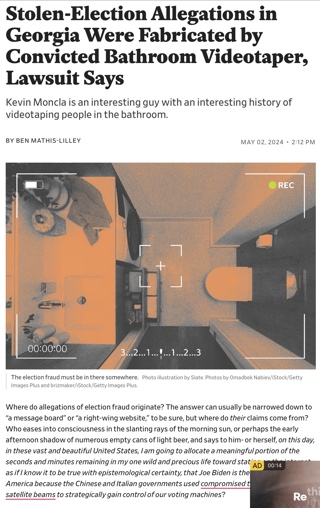
 Assistant Professor Sangbae Kim works on the 70-pound ‘cheetah’ robot designed at MIT. PHOTO: M. SCOTT BRAUER
Assistant Professor Sangbae Kim works on the 70-pound ‘cheetah’ robot designed at MIT. PHOTO: M. SCOTT BRAUERA 70-pound “cheetah” robot designed by MIT researchers may soon outpace its animal counterparts in running efficiency: In treadmill tests, the researchers have found that the robot — about the size and weight of an actual cheetah — wastes very little energy as it trots continuously for up to an hour and a half at 5 mph. The key to the robot’s streamlined stride: lightweight electric motors, set into its shoulders, that produce high torque with very little heat wasted.
The motors can be programmed to quickly adjust the robot’s leg stiffness and damping ratio — or cushioning — in response to outside forces such as a push, or a change in terrain. The researchers will present the efficiency results and design principles for their electric motor at the International Conference on Robotics and Automation in May.
Sangbae Kim, the Esther and Harold E. Edgerton Assistant Professor in MIT’s Department of Mechanical Engineering, says achieving energy-efficiency in legged robots has proven extremely difficult. Robots such as Boston Dynamic’s “Big Dog” carry heavy gasoline engines and hydraulic transmissions, while other electrically powered robots require large battery packs, gears, force sensors and springs to coordinate the joints in a robot’s leg. All this weighty machinery can add up to significant wasted energy, particularly when a robot’s legs need to make frequent contact with the ground in order to trot or gallop.
“In order to send a robot to find people or perform emergency tasks, like in the Fukushima disaster, you want it to be autonomous,” Kim says. “If it could run for more than two hours and search a large field, that would be useful. But one of the reasons why people think it’s impossible to make an electric robot that does this is because efficiencies have been pretty bad.”
Youtube Video
More: MIT ‘Cheetah’ Robot Rivals Running Animals in Efficiency - MIT News Office